
帝国理工学院 - 暑校: Innovating the Future with Robotics IoT and AI
Research, Fuzhou University, Imperial College, 2022
基于机器人、物联网和人工智能创新未来 背景介绍
当下处于一个机器人、人工智能和物联网在塑造未来方面发挥重要作用的时代。这些最先进的应用正在改变行业的技术进步。通过参加此项课程了解这些技术,应用知识和学习经验来设计和开发机器人、人工智能和虚拟现实应用。
课题简介 - 垃圾分类环卫机器人
城市垃圾管理是环境保护的重要组成部分。垃圾分类可以有效减少填埋和焚烧的垃圾量,提高资源的回收利用率。环卫机器人在垃圾分类中的应用有助于实现更精确和高效的分类,从而推动可持续发展。
随着人工智能、机器人技术的发展,垃圾分类环卫机器人得以实现自动识别和分类垃圾。机器人配备的传感器、摄像头和数据处理系统使其能够高效地完成复杂的分类任务,提高垃圾分类的准确性。
在此项目中,我们通过网络摄像头和深度学习,建立了垃圾分类算法模型。然后用常用的公共数据集进行训练,提高识别精度。利用ROS和Gazebo建立虚拟机器人模型和工作场景,编写控制代码控制机器人的自主运动和机械臂的姿态规划。
责任描述
设计垃圾分类环卫机器人结构模型。在Rviz和Gazebo中搭建仿真模型。解算6DoF机械臂正逆运动学,在关节空间下进行机械臂的轨迹设计和运动规划。
成果展示
垃圾分类环卫机器人渲染图

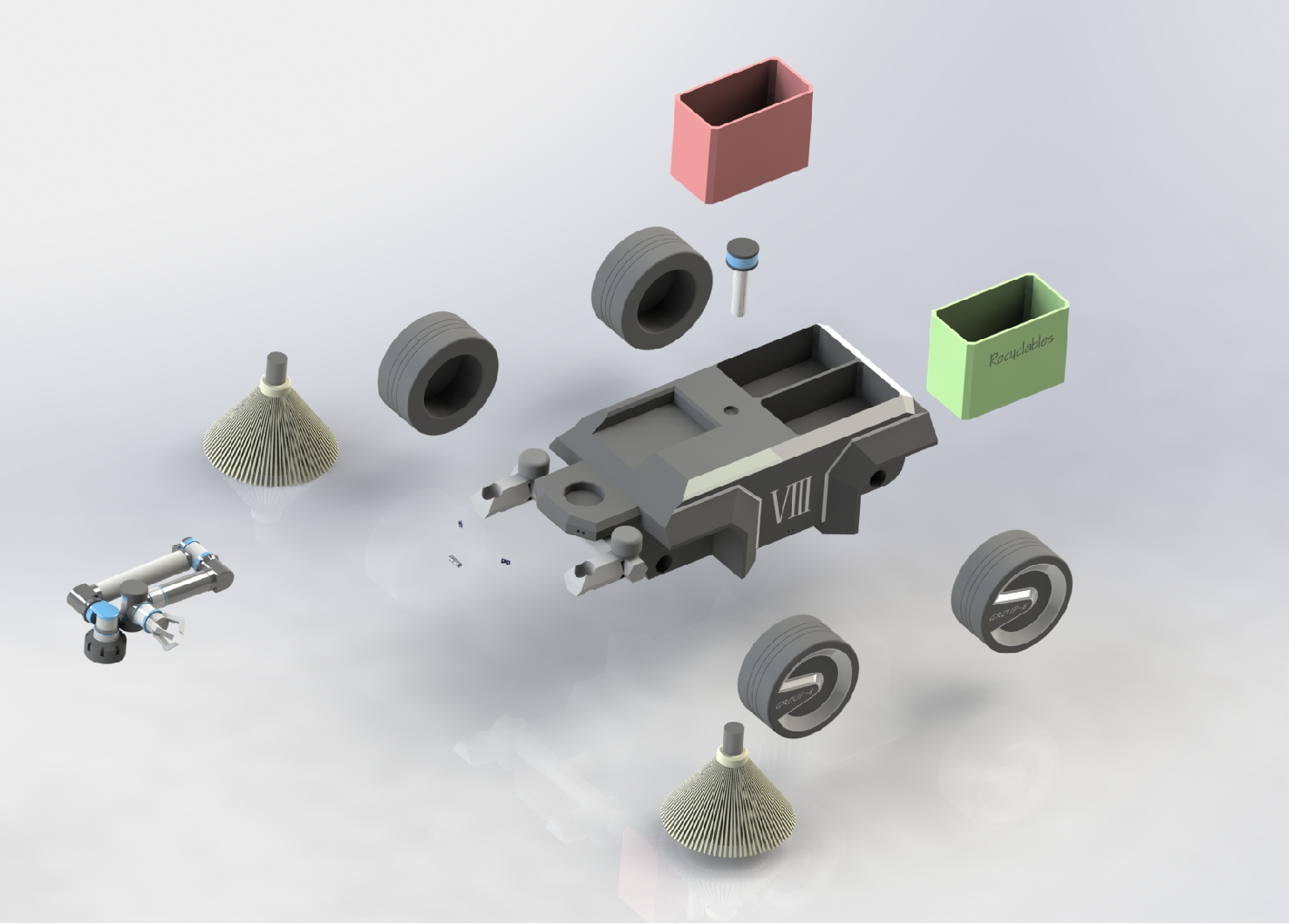
垃圾分类环卫机器人结构爆炸图
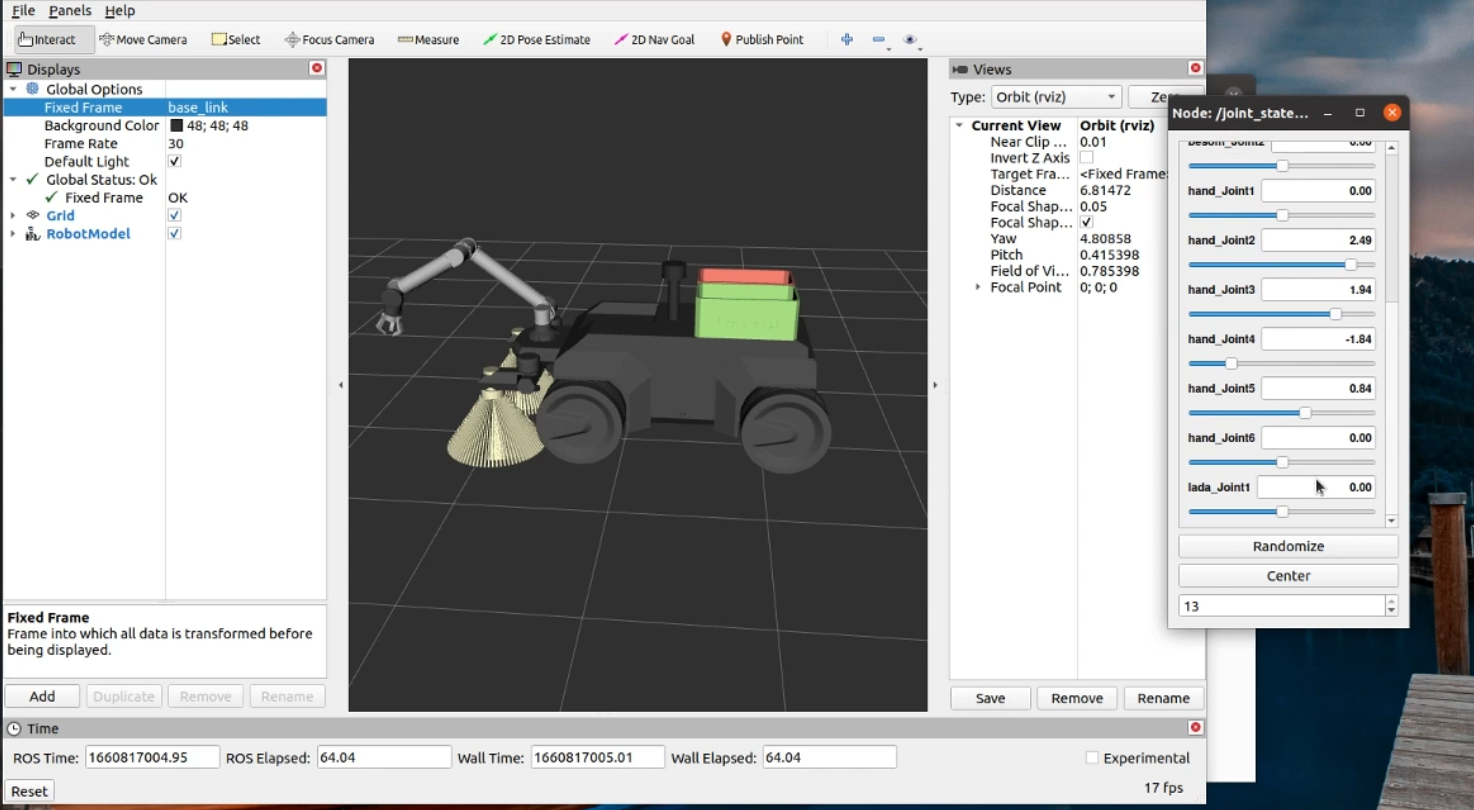
Rviz中的垃圾分类环卫机器人仿真
关节空间轨迹规划原理
1. 确定初始和目标位置
- 初始位置: 机械臂当前的关节角度
- 目标位置: 机械臂期望姿态下的关节角度
2. 关节空间插值
通过插值方法生成从初始位置到目标位置的中间关节角度,确保运动的平滑性。
- 线性插值: 对于每个关节,从初始位置到目标位置进行线性插值。
- q(t) = q_initial + t/T(q_target - q_initial)
3. 生成轨迹
将插值后的关节角度序列转换为轨迹点,形成完整的轨迹序列。
4. 执行轨迹
将生成的轨迹发送给机械臂的控制器,依次执行每个轨迹点的运动。